
Algorithm Design Manual:
Chapter One
Introduction to Algorithm Design
2018-12-18
Designing good algorithms for real-world problems requires the use of techniques (data structures, dynamic programming, backtracking, heuristics, modeling) and resources (other implementations that already exist and can be referenced to as a basis).
Collected implementations of algorithms can be found at http://www.cs.sunysb.ed/~algorith (though that redirects you to this website
Links to example problems can be found at programming - challenges . com - nope, that doesn't exist anymore. He also mentions online-judge.vva.es. Finally found uva.onlinejudge.org which has the problems he mentions in Chapter 1 under the right numbers, but the website is kind of horrendously slow. Still, this should get you to any of the questions you're looking for.
Algorithms are procedures for solving geernal, well-specified, problems. These problems are specified by describing the list of instances it is designed to work on and what the resulting output of each instance should be. It is a procedure to take any of the possible input instances and transform it into the desired output.
An instance is a specific use case for a problem with a specific input in order to determine its output from the problem
Insertion sort is a method for sorting a list/array of values by starting with a single element and iterating through the elements, swapping elements that are out of place
Three qualities of a good algorithm:
- Correct
- Efficient
- Easy to implement
Problem: Robot Tour Optimization
Input: A set S of n points in the plane Output What is the shortest cycle tour that visits each point in the set S?
Nearest Neighbor Psuedocode
NearestNeighbor(P)
Pick and visit an initial point p₀ from P
p = p₀
i = 0
While there are still unvisited points
i = i + 1
select pᵢ to be the closest unvisited point to pᵢ₋₁
Visit pᵢ
Return to p₀ from pn₋₁
This does not work in situations where all points are along a line - might lead to jumping from left to right
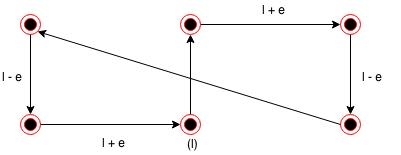
ClosestPair Pseudocode
ClosestPair(P)
Let n be the number of points in set P
For i = 1 to n - 1 do
d = ∞
For each pair of endpoints (s, t) from distinct vertex chains
if dist(s, t) ≤ d and then sm = s, tm = t, and d = dist(s, t)
Connect (sm, tm) by an edge
Connect the two endpoints by an edge
This doesn't work if the data points are two rows of equally spaced points where the two rows are slightly closer than the dots in each row to each other
OptimalTSP(P) PsuedoCode
OptimalTSP(P)
d = ∞
For each of the n! permutations, Pᵢ of point set P
If (cost(Pᵢ) ≤ d) then d = cost(Pᵢ) and Pmin = Pᵢ
Return Pmin
This is accurate but very slow
Difference between algorithms and heuristics
Algorithms always produce a correct result. Heuristics may usually do a good job, but do not provide a guarantee
Problem: Moving Scheduling Problem
Input: A set I of n intervals on the line Output: What is the largest subset of mutually non-overlapping intervals which can be selected from I?
Earliest Job First Pseudocode
EarliestJobFirst(I)
Accept the earliest starting job j from I which does not overlap any previously accepted job and repeat until no such jobs remain
Taking one job may exclude 2, etc., so no guarantee that it will yield the largest subset
Shortest Job First Pseudocode
ShortestFirst(I)
While(I ≠ ∅) do
Accept the shortest job j from I.
Delete j, and any interval which intersects j from I
Accepting the shortest job may block us from taking two other jobs
Exhaustive Scheduling Pseudocode
ExhaustiveScheduling(I)
j = 0
Smax = ∅
For each of the 2n subsets, Sᵢ of intervals I
If (Sᵢ is mutually non-overlapping) and (size (Sᵢ) > j)
then j = size(Sᵢ) and Smax = Sᵢ
Return Smax
Gets all the possibilities, but isn't efficient when size of input gets larger
Optimal Scheduling Psuedocode
OptimalScheduling(I)
While (I ≠ ∅) do
Accept the job j from I with the earliest completion date
Delete j and any interval which intersects j from I
NOTE: ∅ is a symbol for "empty set"
Lesson: Reasonable-looking algorithms can easily be incorrect. Algorithm correctness is a property that must be carefully demonstrated
Mathematical Proof Characteristics
- Clear, precise statements of what you are trying to prove
- Set of assumptions of things which are taken to be true and hence used as part of the proof
- Chain of reasoning which takes you from these assumptions to the statement you are trying to prove
- ∎ QED to indicate finished "this is demonstrated"
Proofs are only useful when honest - brief and to the point arguments explaining why an algorithm satistifes a nontrivial correctness property
Take Home: The heart of any algorithm is an idea. If your idea is not clearly revealed when you express an algorithm, then you are using too low-level a notation to describe it
Problem specifications have two parts:
- Set of allowed input instances
- Required properties of the algorithm's output
Take Home: An important and honorable technique in algorithm design is to narrow the set of allowable instances until there is a correct and efficient algorithm. For example, we can restrict a graph problem from general graphs down to trees, or a geometric problem from two dimensions to one.
Common traps in specifying output requirements:
- Asking an ill-defined question
- Creating compound goals
Counter-Examples - Instances which disprove an algorithm
Good counter-examples have two important properties:
-
Verifiability
- Calculate what answer the algorithm gives
- Display/provide a better answer so as to prove the algorithm didn't find it
- Simplicity
Techniques for coming up with counter-examples:
- Think small - when algorithms fail, there is usually a very simple example on which they fail
- Seek extremes
- Think exhaustively
- Hunt for the weakness
- Go for the tie (good way to break a greedy heuristic)
Recursion
Recursion is mathematical induction - in both, have general and boundary conditions, with general condition breaking the problem into smaller pieces and the boundary condition terminating the recursion
One should be suspicious of inductive proofs because subtle reaoning errors can creep in: First kind of error are boundary errors Second are cavalier extension claims - adding an element could cause entire optimal solution to change
Take Home: Mathematical induction is usually the right way to verify the correctness of a recursive or incremental insertion algorithm
Stop and Think: Incremental Correctness
Problem: Prove the correctness of the following recursive algorithm for incrementing natural numbers (i.e., y -> y + 1):
Increment(y)
if (y = 0 then return (1) else
if (y mod 2) = 1 then
return (2 * Increment(⌊y/2⌋)
else return (y + 1)⌊⌋ are floor symbols. This threw me at first because I mistook them for absolute value symbols.
Increment(3)
if (3 = 0 then return (1) else
if (3 mod 2) = 1 then - nope
return (2 * Increment([3/2]))
Increment(1)
if (1 = 0 then return (1) else
if (1 mod 2) = 1 then
return (2 * Increment([1/2]))
Increment(0)
if (0 = 0 then return (1)
// 2 * (2 * (1)) = 4Summations
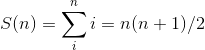
Summation formulae are concise expressions describing the addition of an arbitrarily large set of numbers, in particular the formula

There are simple closed forms for summations of many algebraic functions. For example, since the sum of n ones is n,

The sum of the first n even integers can be seen by pairing up the ith and (n-i+1)th integers:

Two basic classes of summation formaulae in algorithm analysis:
Arithmetic progressions The arithmetic progression for selection sort is:
It's important that the sum is quadratic, not that the constant is 1/2. In general,
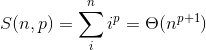
for p≥1. Thus, sum of squares is cubic and the sum of cubes is quartic.
Big theta (ϴ(x)) notation will be explained later in book. For p < -1 the sum converges to a constant, even as n -> ∞
Geometric progression In geometric progressions, the index of the loop affects the exponent, ie:

How we interpret the sum depends on the base of the progression, i.e., a. When a < 1 this converges to a constant even as n -> ∞
This series convergence proves to be the great "free lunch" of algorithm analysis. It means that the sum of a linear number of things can be constant, not linear. For example, 1 + 1/2 + 1/4 + 1/8+...≤ 2 no matter how many terms we add up.
When a > 1, the sum grows rapidly with each new term, as in 1 + 2 + 4 + 8 + 16 + 32 = 63. Indeed,
 for a > 1
for a > 1
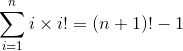
Stop And Think: Factorial Formulae
Problem: Prove that
 Note: Formula in book actually had n at the top to the right of the sum and i = 1 on the bottom to the right of the sum, but further examples had it oriented this way
Note: Formula in book actually had n at the top to the right of the sum and i = 1 on the bottom to the right of the sum, but further examples had it oriented this way
Solution: First verify the base case (here we do n = 1, though n = 0 could have been done:

Assume the statement is true up to n. To prove the general case of n + 1, observer that rolling out the largest term

reveals the left side of our inductive assumption. Substituting the right side gives us



This general trick of separating out the largest term lies at the heart of all proofs.
Modeling the Problem
Modeling is the the skill of taking your application and describing it in such a way that you can connect what problems you need to solve with the abstract algorithms you can use to solve them
Combinatorial Objects (Common Structures):
Here is a list of common objects and the keywords to know to use them
Permutation: Arrangements of items. Keywords: arrangement, tour, ordering, sequence
Subsets: Selections from a larger group of items. As order does not matter in subsets as they matter in permutations, permutations of subsets are considered identical. Keywords: cluster, collection, committee, group, packaging, selection
Trees: A structure used to represent hierarchical relationships between items. Keywords: dominance relationship, ancestor/descendant relationship, taxonomy, hierarchy
Graphs: Structures used to represent relationships between arbitrary pairs of objects. Keywords: network, circuit, web, relationship
Points: Represent locations in geometric space. Keywords: positions, sites, data records, locations
Polygons: Represent regions in geometric space, eg borders of a country can be described by a polygon on a map/plane. Keywords: regions, shapes, configurations, boundaries
Strings: Sequence of characters or patterns. Keywords: text, characters, patterns, labels
Recursive decompositions of combinatorial objects:
Permutations
{4, 1, 5, 2, 3} -> 4+{1, 4, 2, 3}
Subsets
{1, 2, 7, 9} -> 9+{1, 2, 7}
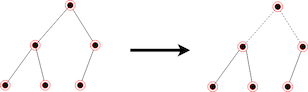
Trees
Graphs

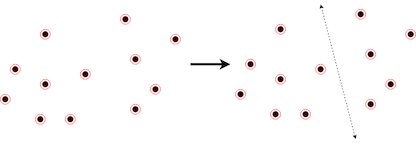
Point Sets
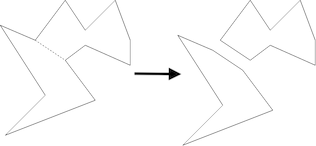
Polygons
Strings
A L G O R I T H M -> A | L G O R I T H M
Take Home: Modeling your application in terms of well-defined structures and algorithms is the most important single step towards a solution
Recursive Objects
The key to recursive thinking is looking for things that are comprised of smaller things of the same type. All of the items in the combinatorial objects list could be thought about recursively.
Permutations: If you delete the first element of a permutation, you'll get a permutation of the remaining elements. Permutations are recursive objects.
Subset: Subsets contain subsets of even smaller subsets. Subsets are also recursive objects
Trees: If you delete the root of a tree, you'll get a collection of smaller trees. If you delete a leaf, you're left with a slightly smaller tree. Trees are recursive objects.
Graphs If you remove any edge or vertex from a graph, the resulting structure is still a graph. Graphs are recursive objects
Points: If you remove or separate points, you're still left with points. Points are recursive objects.
Polygons: Polygons are recursive because you can split them apart by adding chords between nonagent vertices and still end up with a polygon. The smallest simple polygon is a triangle
Strings If you add or remove characters of a string, you're still left with a string
Psychic Lottery
Problem: Given four lotto numbers (out of 15), find smallest number of tickets needed to guarantee at least one winning ticket.
- Need a way to generate subsets
- Need a way to cover
- Need to keep track of combinations covered
- Need search algorithm to decide what to pick next
PseudoCode
LottoTicketSet(n, k, l)
Initialize the
 -element bit-vector V to all false
-element bit-vector V to all false
While there exists a false entry in V
Select a k-subset T of {1, ...n} as the next ticket to buy
For each of the l-subsets of Tᵢ of T, V[rank(Tᵢ)] = true
Report the set of tickets bought
Client provided counter-example - 5 tickets would cover when the algorithm had said it would take 28.
Problem in modeling -> didn't need to cover every combination (which they would have realized if they'd attempted to solve a small example by hand before jumping into code)
Recommended books for war stories: Mythical Man Month and Programming Pearls